Servi¶
These endpoints and their message types are only available for the Servi robot family. Attempting to run a Servi commands on a non Servi robot will result in an INVALID_ARGUMENT error.
CreateMission¶
Use the shared CreateMission endpoint to send missions for Servi robots. Servi-specific missions must be sent using the appropriate request message format.
Note
When sending a Servi mission, servi.Feedback and ServiType are returned in SubscribeMissionStatus response message.
servi.Feedback enum¶
| Name | Number | Description |
|---|---|---|
| STATUS_UNKNOWN | 0 | Default value. It means status field is not returned. |
| STATUS_NAVIGATING | 1 | The robot is currently navigating to its goal. |
| STATUS_ARRIVED | 2 | The robot has arrived at a goal. |
| STATUS_DOCKING | 3 | The robot is performing a docking maneuver. |
| STATUS_UNDOCKING | 4 | The robot is performing an undocking maneuver. |
ServiType enum¶
| Name | Number | Description |
|---|---|---|
| SERVI_TYPE_UNKNOWN | 0 | Default value for servi type. |
| SERVI_TYPE_SERVING | 1 | A serving mission that navigates to goals, stopping until weight is removed. |
| SERVI_TYPE_SERVING_PATROL | 2 | A serving patrol mission that continuously loops until all weight is removed. |
| SERVI_TYPE_BUSSING | 3 | A bussing mission that navigates to goals, stopping until weight is added. |
| SERVI_TYPE_BUSSING_PATROL | 4 | A bussing patrol mission that continuously loops until weight exceeds threshold. |
| SERVI_TYPE_NAVIGATE | 5 | A single navigation mission with a predefined goal. |
| SERVI_TYPE_NAVIGATE_AUTO | 6 | An automated navigation mission that selects the best available goal from a list. |
Request¶
robot_id string required¶
The ID of the robot that will receive this command.
mission Mission required¶
Universal wrapper for mission types. Only one mission type may be set at a time.
| Field (oneof) | Message Type | Description |
|---|---|---|
base_mission |
BaseMission |
Base missions are applicable to all robot families. Refer to Mission for how to create and send a base mission. |
servi_mission |
servi.Mission |
Servi missions are specific to the Servi robot family. |
carti_mission |
carti.Mission |
Carti missions are specific to the Carti robot family. Refer to Carti for how to create and send a carti mission. |
servi_mission servi.Mission¶
Use the field servi_mission to create and send a servi mission. Current API version supports 6 types of Servi mission.
| Field (oneof) | Message Type | Description |
|---|---|---|
delivery_mission |
DeliveryMission |
Create a servi mission of type Delivery. |
bussing_mission |
BussingMission |
Create a servi mission of type Bussing. |
delivery_patrol_mission |
DeliveryPatrolMission |
Create a servi mission of type DeliveryPatrol. |
bussing_patrol_mission |
BussingPatrolMission |
Create a servi mission of type BussingPatrol. |
navigate_mission |
NavigateMission |
Create a servi mission of type Navigate. |
navigate_auto_mission |
NavigateAutoMission |
Create a servi mission of type NavigateAuto. |
delivery_mission DeliveryMission¶
A mission that navigates to one or more goals, stopping at each for a set amount of time or until some weight is removed.
| Field | Message Type | Description |
|---|---|---|
goals |
repeated Goal required |
a list of Goal |
params |
DeliveryParams |
Parameters for delivery mission. |
bussing_mission BussingMission¶
A mission that navigates to one or more goals, stopping at each for a set amount of time or until some weight is added.
| Field | Message Type | Description |
|---|---|---|
goals |
repeated Goal required |
a list of Goal |
params |
BussingParams |
There is no param defined in this API version. |
delivery_patrol_mission DeliveryPatrolMission¶
A mission that continuously loops through goals, stopping at each for a set amount of time or until all weight is removed.
| Field | Message Type | Description |
|---|---|---|
goals |
repeated Goal required |
a list of Goal |
params |
DeliveryPatrolParams |
There is no param defined in this API version. |
bussing_patrol_mission BussingPatrolMission¶
A mission that continuously loops through goals, stopping at each for a set amount of time or until weight exceeds a threshold.
| Field | Message Type | Description |
|---|---|---|
goals |
repeated Goal required |
a list of Goal |
params |
BussingPatrolParams |
There is no param defined in this API version. |
navigate_mission NavigateMission¶
A mission consisting of a single, explicitly defined goal.
| Field | Message Type | Description |
|---|---|---|
goal |
Goal required |
Single target goal for navigation. |
navigate_auto_mission NavigateAutoMission¶
A mission that automatically selects the first unoccupied and unclaimed goal from the provided list, preferring goals with lower index values. For example, when sending a robot to one of several possible goals [T1, T2, T3], it will first check if T1 is unoccupied and unclaimed, then T2, and finally T3. If all goals are occupied or claimed, the mission will fail.
| Field | Message Type | Description |
|---|---|---|
goals |
repeated Goal required |
List of potential goals to choose from. |
DeliveryParams DeliveryParams¶
Parameters for a delivery mission.
| Field | Message Type | Description |
|---|---|---|
tray_mappings |
repeated TrayMapping |
Tray mappings for the delivery mission. Only supported for Servi+ robots. |
TrayMapping TrayMapping¶
Mapping between a given tray to a goal. Note: Tray mapping is only supported for Servi+ robots.
| Field | Message Type | Description |
|---|---|---|
tray_name |
string |
Name of the tray. |
goal |
Goal |
Target goal for this tray. |
JSON Request Example¶
Response¶
mission_id string¶
The ID of the mission created.
JSON Response Example¶
Errors¶
| ErrorCode | Description |
|---|---|
INVALID_ARGUMENT |
This command is sending to is not a Servi family robot. |
FAILED_PRECONDITION |
The robot is already executing another mission. This command is valid if current mission is in terminal state, e.g Cancelled, Succeeded, Failed. |
CalibrateTrays¶
Calibrates the trays on the robot.
Only applicable for tray-equipped robots (e.g., Servi, Servi Plus).
Calibrates all trays if no tray names are provided. Returns an INVALID_ARGUMENT error and rejects the request if any tray name is invalid. Returns an empty response on success.
Request¶
robot_id string required¶
The ID of the robot to calibrate trays on.
selector servi.TraySelector required¶
Selector to specify which trays to calibrate.
| Field | Message Type | Description |
|---|---|---|
tray_names |
repeated string |
List of tray names to calibrate. If empty, calibrates all trays. |
JSON Request Example¶
Response¶
(No fields defined)
JSON Response Example¶
Errors¶
| ErrorCode | Description |
|---|---|
INVALID_ARGUMENT |
This command is being sent to a non-Servi robot, or any tray name is invalid. |
PERMISSION_DENIED |
Attempting to calibrate trays for a robot_id you don't own. Tip: check the spelling of the robot_id value. |
NOT_FOUND |
The specified robot ID does not exist. |
INTERNAL |
Internal server error occurred while processing the request. |
SubscribeTrayStatuses¶
Subscribes to the robot's tray status updates.
Upon subscription, the latest known tray states are sent immediately. Updates are streamed when any tray state changes.
Note
Weight changes are reported with 10g precision.
Request¶
selector RobotSelector required¶
RobotSelector is used to select specific robots.
It supports selection by a list of robot IDs OR all robots at a given location.
| Field | Message Type | Description |
|---|---|---|
robot_ids |
RobotIDs |
Selects robots by their specific IDs. Example: ["pennybot-123abc", "pennybot-abc123"] |
location_id |
string |
Selects all robots at the specified location. |
JSON Request Example¶
Response¶
tray_states map<string, TrayStatesWithMetadata>¶
A mapping of tray states reported by individual robots. Each entry pairs a robot ID (key) with its corresponding tray states.
TrayStatesWithMetadata¶
| Field | Message Type | Description |
|---|---|---|
metadata |
EventMetadata |
Metadata associated with the tray states. |
tray_states |
TrayStates |
The tray states reported by the robot. |
TrayStates TrayState repeated¶
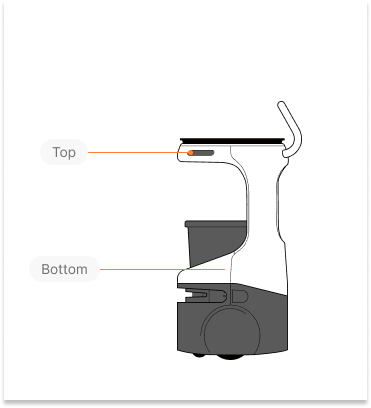
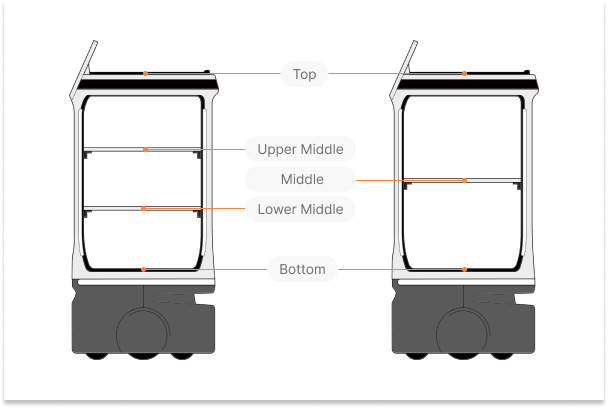
State of enabled trays, ordered from the top-most tray on the robot to the bottom.
TrayState¶
Represents the state of a single tray.
| Field | Message Type | Description |
|---|---|---|
tray_name |
string |
Unique string name for the given tray. e.g. "top", "middle", "bottom" See illustrations for tray configurations on different robot models. |
load_state |
LoadState enum |
Current load state of the tray. |
weight_kg |
float |
Weight on the tray in kilograms. Minimum precision is 10g. |
load_ratio |
float |
Ratio of the current load to the tray's maximum load capacity. This value may exceed 1.0 if the tray is overloaded. Caveats: - If the maximum load is misconfigured (e.g., set to 0.0), this value may return NaN. |
LoadState enum¶
| Name | Number | Description |
|---|---|---|
| LOAD_STATE_UNKNOWN | 0 | Default value. It means the load_state field is not returned. |
| LOAD_STATE_LOADED | 1 | The tray has a valid load. |
| LOAD_STATE_EMPTY | 2 | The tray is empty. |
| LOAD_STATE_OVERLOADED | 3 | The tray is carrying more than its maximum capacity. |
Errors¶
| ErrorCode | Description |
|---|---|
INVALID_ARGUMENT |
This command is sending to is not a Servi family robot. |
PERMISSION_DENIED |
Attempting to request status for a robot_id or location_id you don't own. Tip: check the spelling of all robot_id or location_id values. |
INTERNAL |
Internal server error occurred while processing the request. |
JSON Response Example¶
{
"trayStates": {
"pennybot-456efg": {
"metadata": {
"timestamp": "2025-04-01T16:00:00Z",
"sequenceNumber": 105
},
"trayStates": [
{
"trayName": "top",
"loadState": "LOAD_STATE_OVERLOADED",
"weightKg": 8.1,
"loadRatio": 1.18
},
{
"trayName": "middle",
"loadState": "LOAD_STATE_LOADED",
"weightKg": 2.3,
"loadRatio": 0.76
},
{
"trayName": "bottom",
"loadState": "LOAD_STATE_EMPTY",
"weightKg": 0,
"loadRatio": 0
}
]
}
}
}
Tray configurations on different Servi models¶
Servi Plus¶
Servi¶
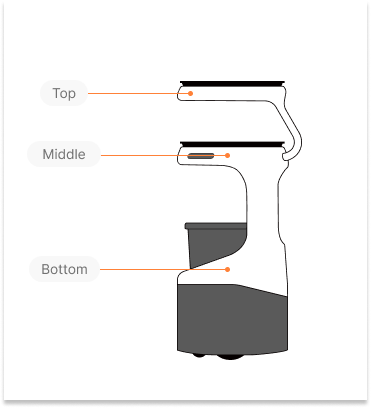
Servi Mini¶